T型机械手是一种常见的工业自动化设备,它可以完成各种物料的抓取、放置、搬运等任务。T型机械手的工作原理主要是通过程序控制,利用各种传感器、执行器和控制系统实现对机械手的准确控制和操作。
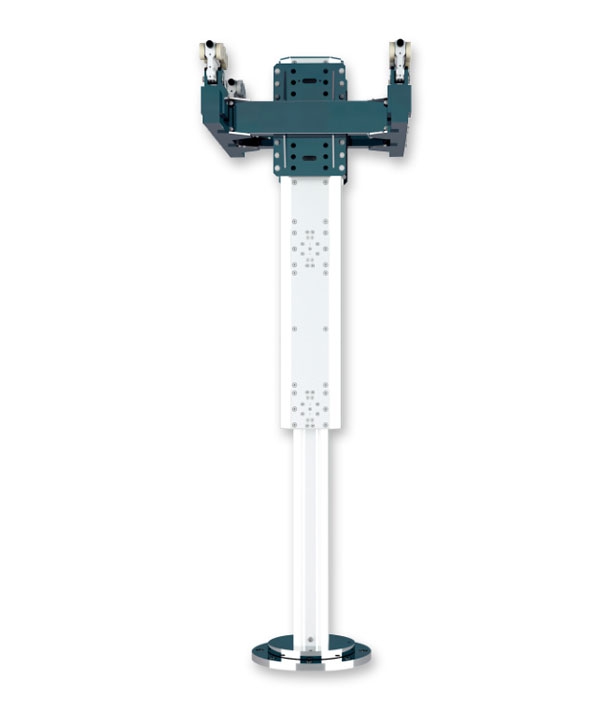
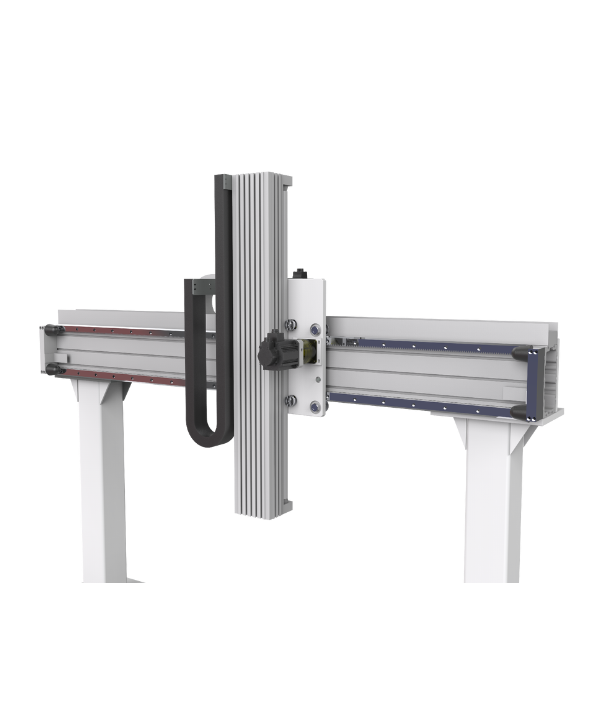
T型机械手通常由机械臂、控制器、传感器和执行器等组成。机械臂是机械手的主体部分,可以根据需要进行伸缩、旋转等动作,完成不同的工作任务。控制器是机械手的“大脑”,负责接收并处理用户输入的指令,然后控制机械手的运动。传感器用于感知周围环境的信息,比如检测物体的位置、形状、重量等,从而帮助机械手准确地执行任务。执行器则是机械手的“手”,负责根据控制器的指令对物体进行抓取、放置等动作。
T型机械手的工作流程通常包括以下几个步骤:首先,用户通过控制器输入相关指令,包括目标位置、动作要求等。接着,传感器感知周围环境的信息,并将这些信息传输给控制器。控制器根据传感器的信息,计算出较好的动作轨迹和参数,然后通过执行器控制机械手按照设定的路径和参数完成任务。之后,机械手完成任务后,控制器会向用户反馈任务执行情况,用户可以根据需要进行调整或修改。
总的来说,T型机械手的工作原理是通过程序控制和传感器反馈实现对机械手的准确控制和操作,从而完成各种物料的抓取、放置、搬运等任务。通过不断优化机械手的设计和控制算法,可以提高机械手的工作王中特王(科技)有限责任公司和精度,进一步推动工业自动化的发展。